Make a donation
Please finish the form below
Thank you! Your submission has been received!
Oops! Something went wrong while submitting the form
Thank you! Your submission has been received!
Oops! Something went wrong while submitting the form
Selon l'Organisation Mondiale de la Santé, il y a actuellement plus de 40 millions de personnes malvoyantes dans le monde, confrontées à de nombreux défis quotidiens, notamment lorsqu’elles se déplacent dans les espaces urbains. En marchant, diverses caractéristiques environnementales présentent un danger : escaliers, vélos et voitures, obstacles physiques sur le trottoir, etc. Ces éléments limitent fortement leur mobilité et leur indépendance, ce qui affecte leur qualité de vie. Il existe des technologies qui améliorent dans une certaine mesure la mobilité des piétons malvoyants en indiquant les obstacles routiers à proximité. Cependant, celles-ci manquent d'informations importantes sur l'espace environnant.
L'étude, publiée dans la revue ‘Environment and Planning B : Urban Analytics and City Science’, a examiné la possibilité d'utiliser OpenStreetMap pour cartographier les données spatiales pertinentes pour les piétons aveugles, tout en calculant des itinéraires de marche optimisés. OpenStreetMap est une infrastructure cartographique Open Source basée sur de nombreuses données géographiques fournies par des citoyens du monde entier.
Dans son étude, Achituv a développé un logiciel de calcul générant des itinéraires de marche adaptés aux besoins des piétons aveugles.
L'étude comprenait une enquête approfondie, des observations et des entretiens avec des guides d'orientation et de mobilité, ainsi qu'avec des personnes aveugles. Le travail sur le terrain a permis de définir clairement les critères spatiaux qui reflètent le mieux les aspects de la mobilité, de l'accessibilité et de la sécurité, définis par quatre paramètres principaux concernant l’itinéraire : sa complexité géométrique ; son type et son utilisation ; sa longueur et ses points de repère. D'autres caractéristiques ont également été intégrées, telles que l'accessibilité des feux de signalisation.
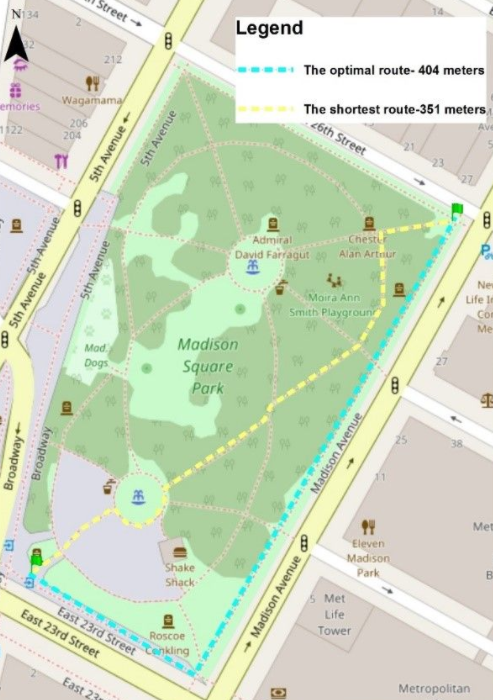
Le logiciel évalue les données environnementales et sémantiques qui sont importantes pour les malvoyants, en mettant l'accent sur des itinéraires sûrs et pertinents. Ces critères permettent un examen qualitatif et quantitatif des différents segments de route disponibles entre le point de départ et la destination, déterminant ainsi le niveau d'accessibilité et de sécurité en recommandant l'itinéraire le plus optimisé.
Le logiciel développé a été testé par des volontaires aveugles et un professionnel (guide d'orientation) dans plusieurs endroits. Non seulement les itinéraires recommandés par le nouveau logiciel étaient identiques aux itinéraires définis par un guide expérimenté, mais les volontaires ont constaté que, dans la plupart des cas, l'itinéraire choisi par le logiciel était effectivement plus accessible et plus sûr pour la marche que les itinéraires calculés par les logiciels commerciaux existants, tels que Google Maps.
Ces résultats indiquent ainsi que le logiciel est un outil efficace et utile, améliorant la vie des personnes malvoyantes.
Retrouvez-nous sur les réseaux sociaux !
.png)


